Incremental encoders are sensors for measuring rotations. With the use of a timer, is possible to measure the angular velocity of a rotation. The angle can be calculated by integration over time. Because of the fixed radius of the wheels, the driven distance can be determined by the multiplication of the angle and the radius.
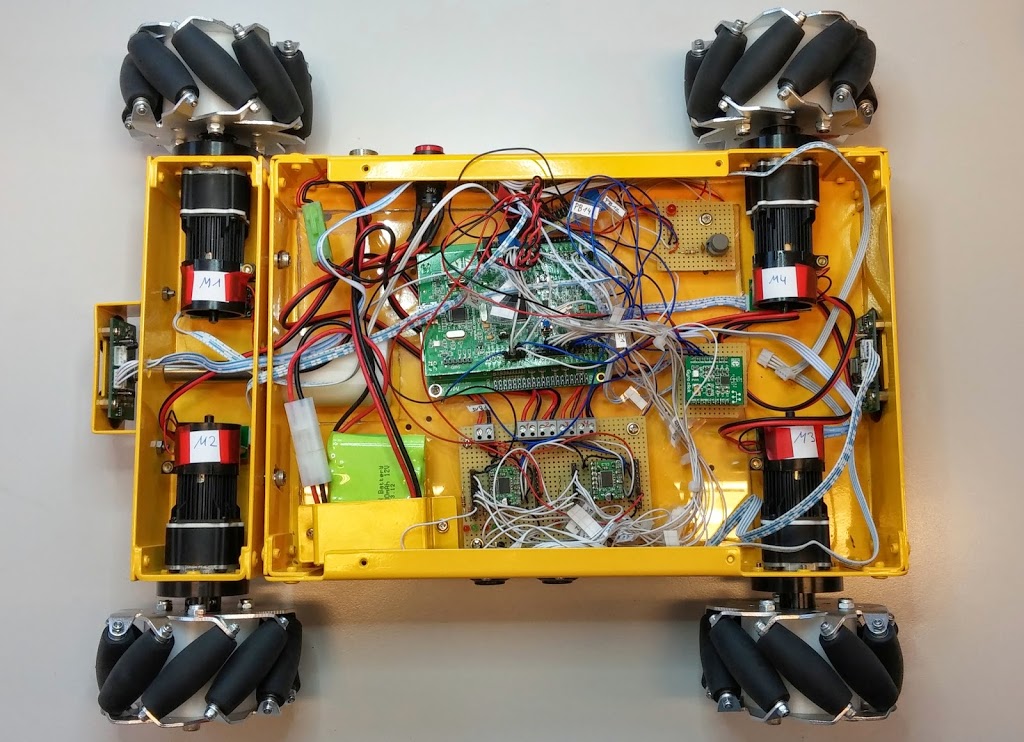
The Nexus robot has four photoelectric incremental encoders, which generates 12 pulses per rotation. The photoelectrical encoder emits a light pulse through a rotating disc, which has a couple of slits. Thus, a periodic signal is generated, which allows concluding the velocity and the direction of a wheel. This signal is getting interpreted by the STM32F4 controller and processed by the software. The rotations of the motors are transmitted by a gear with a ratio of 64:1. So the count of the pulses is increased to 768 pulses per rotation. The STM32F4 controller has quadrature encoders, so the steps per rotation are again increased by factor four to 3072 in total. Thus, the resolution of the incremental encoder is approximately 0.117°.
The following example shows the initialization of an encoder as a quadrature encoder: