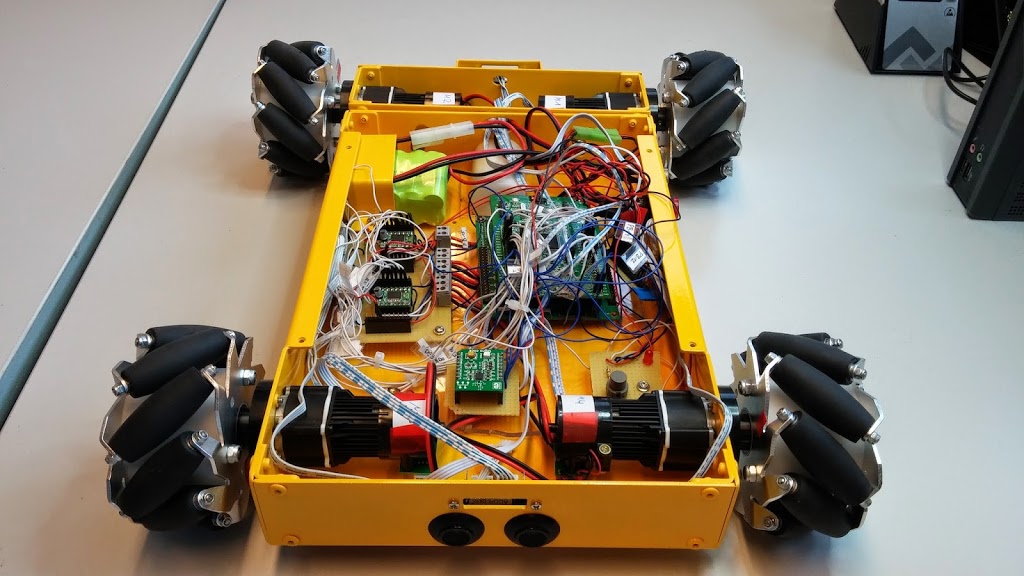
STM32F4 basierter Mecanum Roboter mit Odometrie
In den vergangenen Monaten habe ich mich in den STM32F4-Controller eingearbeitet, um ein (Roboter-)Projekt damit umzusetzen. Genauer gesagt, handelt es sich um einen Roboter, der über Mecanum-Räder (oder auch swedish-wheels) verfügt.…
Kommentare deaktiviert für STM32F4 basierter Mecanum Roboter mit Odometrie
3. Januar 2021