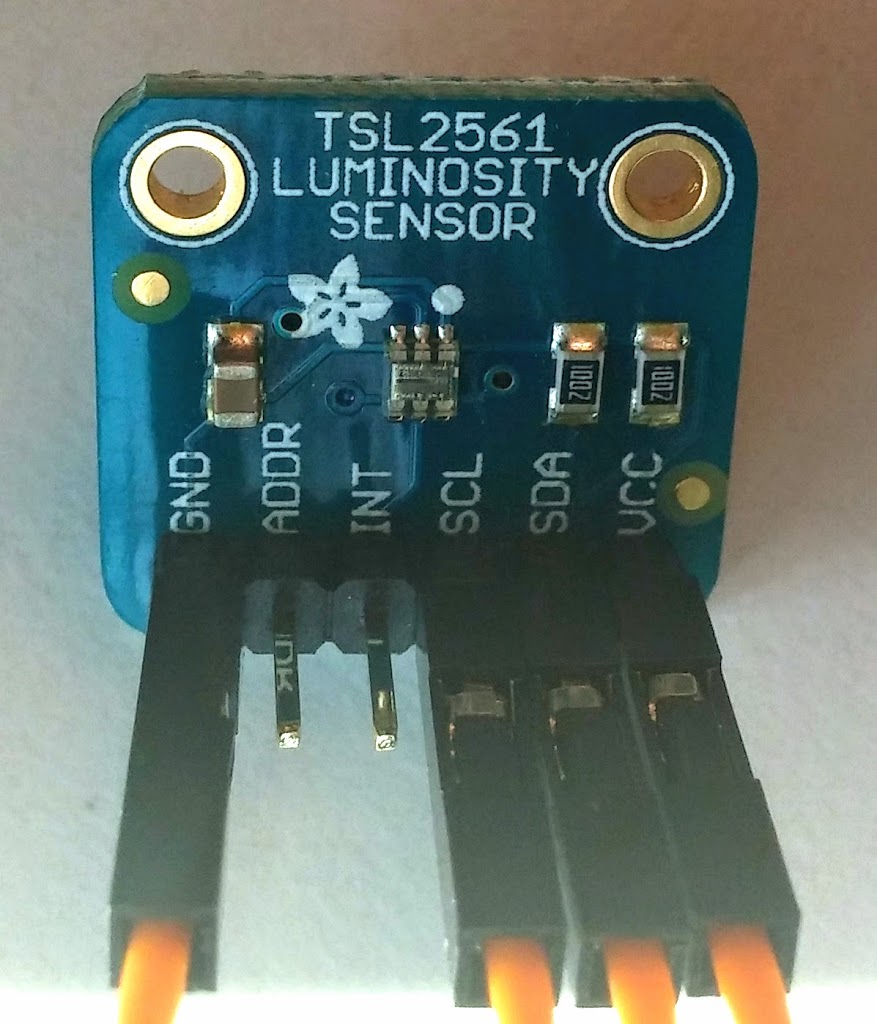
The STM32F4 controller has several I2C interfaces. The example implementation uses the I2C1, which is connected to GPIO6 (SCL) and GPIO7 (SDA). The configuration is encapsulated to a configuration header, so it is easy to change the bus. The software can be downloaded from the repository (the project is called TSL2561_example). The maximum clock frequency for the device is 400kHz, so this frequency is set in the configuration file. The init_lightsensor(void) method is configures the necessary IOs and the I2C communication via initLightSensorI2C(void).
To read the measured values, there are four registers (two for every channel), that can be read. First, there is an 8-bit register that contains the values low byte and then there is a second register for the high byte.